- 분류 2026
- 작성일 2026.03.16
- 작성자 김원석
- 조회수 245
연구실명: 디지털트윈 피지컬AI 연구실
연구분야: 디지털트윈 시뮬레이션, Sim2Real, 월드모델, 강화학습, 최적화
홈페이지: https://sites.google.com/view/dtnlab
지도교수: 김원석
연구실 졸업과제 주제
Physical AI 공동운영과제 (세부사항은 첨부파일 참고)
1. JetBot을 활용한 지능형 RC카 제어 컴피티션
2. LeRobot SO-101을 활용한 지능형 로봇팔 제어 컴피티션 (배정완료)
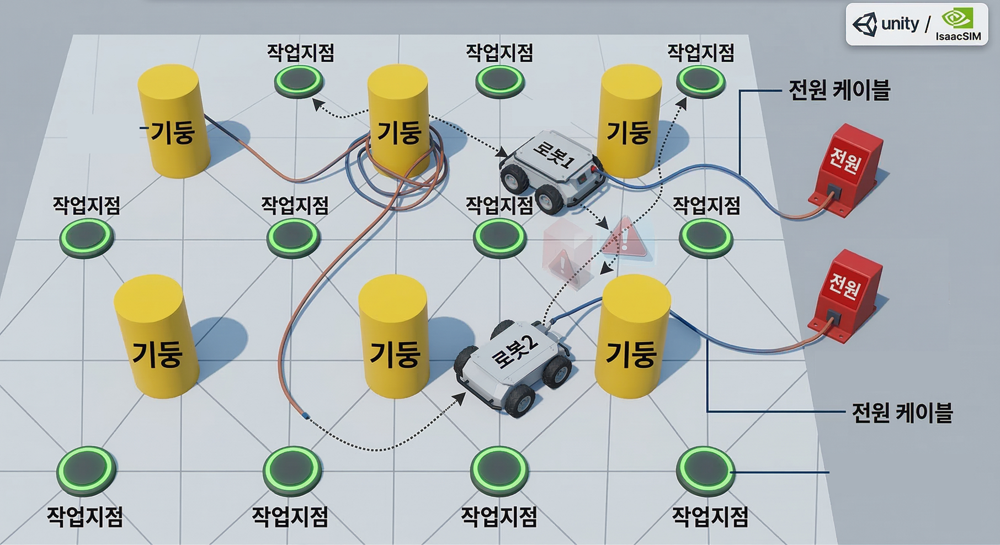
3. 디지털트윈 시뮬레이터 기반 자율주행로봇 에이전트 학습
- Unity 또는 IsaacSIM을 활용한 자율주행로봇 작업 환경 구현
- 전원 케이블이 연결된 두 대의 로봇이 동시에 작업하며, 각 로봇은 구역 내 모든 작업지점을 1회 씩 방문해야 함
- 기둥 장애물 및 케이블 최대 길이 한계를 고려해야 함
- 멀티에이전트 강화학습 기반 최적 작업경로 생성 및 주행 테스트
4. 강화학습·LLM을 활용한 Pokemon Red 스피드런 에이전트 학습 (배정완료)
- 화면 및 데이터를 관측하여 게임의 논리를 이해하는 월드모델 기반 강화학습 에이전트 설계
- 다양한 학습 기법을 활용하여 Long Horizon 게임 진행 전략을 학습
- LLM을 활용한 에이전트 플래너 설계
- 실제 환경에 적용한 후 성능평가 및 모델 경량화
졸업과제 개별상담
1. 지도교수 메일로 희망 주제, 조원(이름, 학번)을 작성하여 상담 신청 (wonsukkim@pusan.ac.kr)
2. 상담 가능 일정을 메일로 회신 (수시)
3. 상담 후 주제 배정 여부 결정
기타사항
- 주제별 1팀 모집
- 수행에 필요한 하드웨어 및 SDK 등은 연구실에서 제공
- (필수) 졸업과제 수행기간 동안 주기적으로 (2주 or 한달) 진행상황 미팅 가능한 팀 (학기 중, 방학 포함)
 (공지) 피지컬AI_졸업과제_공지문_2026전기_v1.1.pdf
(공지) 피지컬AI_졸업과제_공지문_2026전기_v1.1.pdf